 Pinouts
Pinouts
Hlavní moduly
Nejčastěji budeme používat dva zákldaní moduly, s ESP32:
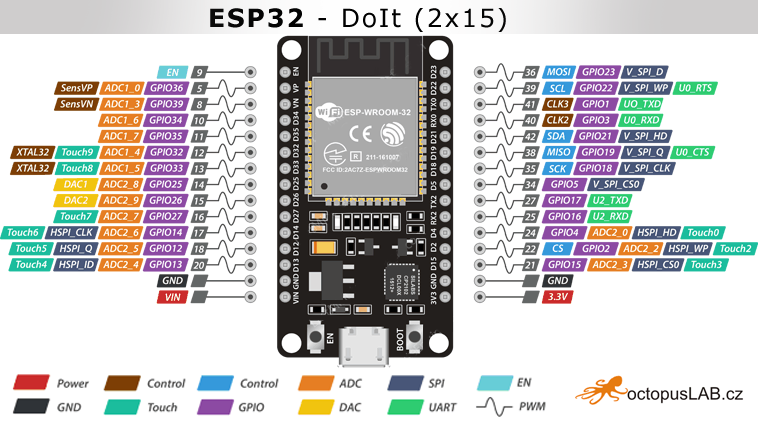
Modul ESP32 DoIt 2x15
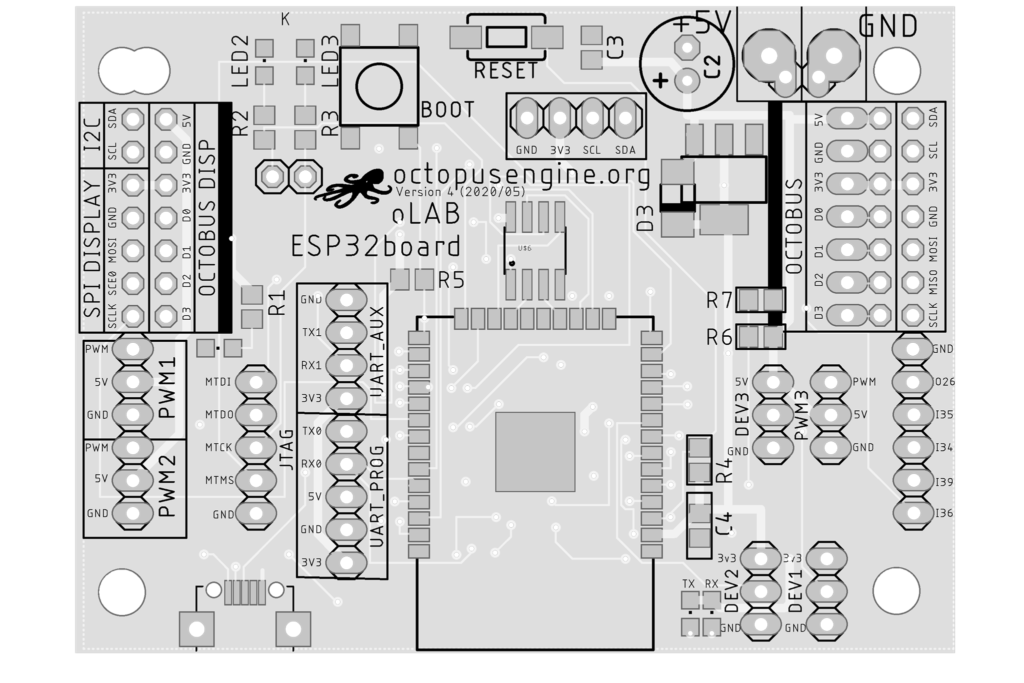
Modul OctopusLAB ESP32board
Pinouts files - zapojení PINů
Celý komplet souborů pinouts je na Githubu. Zaměříme se proto jen na některé hlavní části:
 base.py
base.py
# Base abstract pinouts without any, this base can be replaced by any board specific settings
# Here should be definiton of every pins used in Octopus library
BUILT_IN_LED = None
HALL_SENSOR = None
# I2C
I2C_SCL_PIN = None
I2C_SDA_PIN = None
# SPI
SPI_CLK_PIN = None
SPI_MISO_PIN = None
SPI_MOSI_PIN = None
SPI_CS0_PIN = None
# Default basic pins
ANALOG_PIN = None
BUTT1_PIN = None
PIEZZO_PIN = None
WS_LED_PIN = None
ONE_WIRE_PIN = None
# Input pins
I39_PIN = None
I34_PIN = None
I35_PIN = None
# IoT Specific pins
RELAY_PIN = None
MFET_PIN = None
BUTT1_PIN = None
BUTT2_PIN = None
BUTT3_PIN = None
# PWM pins
PWM1_PIN = None
PWM2_PIN = None
PWM3_PIN = None
# DEV pins
DEV1_PIN = None
DEV2_PIN = None
DEV3_PIN = None
# DC motors
MOTOR_12EN = None
MOTOR_34EN = None
MOTOR_1A = None
MOTOR_2A = None
MOTOR_3A = None
MOTOR_4A = None
# Witty specifiv
LED_RED = None
LED_GRE = None
LED_BLU = None
# UART
RXD0 = None # Used for REPL
TXD0 = None # Used for REPL
RXD1 = None
TXD1 = None
olab_esp32_robot_board1.py
"""
This is octopusLab basic library for robotBoard PCB and esp32 soc
I2C / SPI / MOTORs / SERVO / PWM...
Edition: --- 2.12.2018 ---
"""
from micropython import const
from pinouts.olab_esp32_base import *
##WS_LED_PIN 13 # Robot Board v1
WS_LED_PIN = const(15) # Robot Board v2 - WS RGB ledi diode
ONE_WIRE_PIN = const(32) #one wire (for Dallas temperature sensor)
PIEZZO_PIN = const(27)
# DC motors
MOTOR_12EN = const(25)
# Select version of robot board
##MOTOR_34EN 15 # Robot Board v1
MOTOR_34EN = const(13) # Robot Board v2
MOTOR_1A = const(26)
MOTOR_2A = const(12)
MOTOR_3A = const(14)
MOTOR_4A = const(27)
#main analog input (for power management)
ANALOG_PIN = const(36)
#PWM/servo:
PWM1_PIN = const(17)
PWM2_PIN = const(16)
PWM3_PIN = const(4)
#pwm duty for servo:
SERVO_MIN = const(38)
SERVO_MAX= const(130)
#inputs:
I39_PIN = const(39)
I34_PIN = const(34)
I35_PIN = const(35)
#temp
MFET_PIN = const(17) # PWM1
RELAY_PIN = const(16) # PWM2
# DEV pins
DEV1_PIN = const(32)
DEV2_PIN = const(33)
olab_esp32_esp32_board1.py
Toto bude postupem času hlavní OctopusLAB modul:
"""
This is octopusLab basic library for ESP32 board PCB and esp32 soc
Edition: --- 10.8.2019 ---
"""
from micropython import const
from pinouts.olab_esp32_base import *
BUTT1_PIN = const(0)
PWM1_PIN = const(17)
PWM2_PIN = const(16)
PWM3_PIN = const(25)
DEV1_PIN = const(32) # RAM
DEV2_PIN = const(33) # RAM
DEV3_PIN = const(27)
#inputs:
I34_PIN = const(34)
I39_PIN = const(39)
I35_PIN = const(35)
# UART 1
RXD1 = const(36)
TXD1 = const(4)
PIEZZO_PIN = const(27) # hack on DEV3